
A comprehensive portfolio
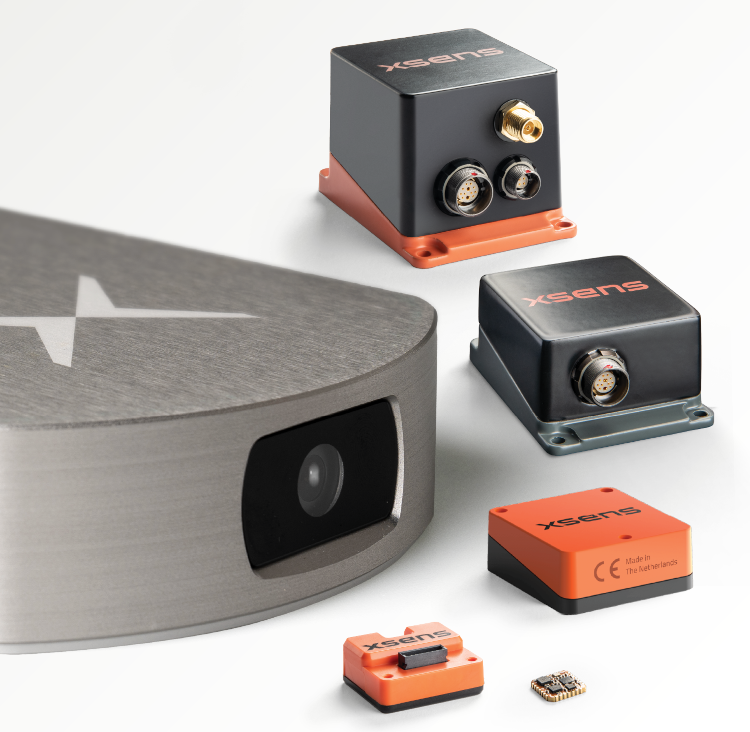
Our range of inertial sensor modules delivers functionality where it matters. These range from inertial measurement units (IMU), vertical reference units (VRU), Motion Reference Units for Marine applications (MRU), and attitude and heading reference systems (AHRS) to fully integrated GNSS/INS (Global Navigation Satellite System/Inertial Navigation System).
Xsens portfolio includes the following product series:
-
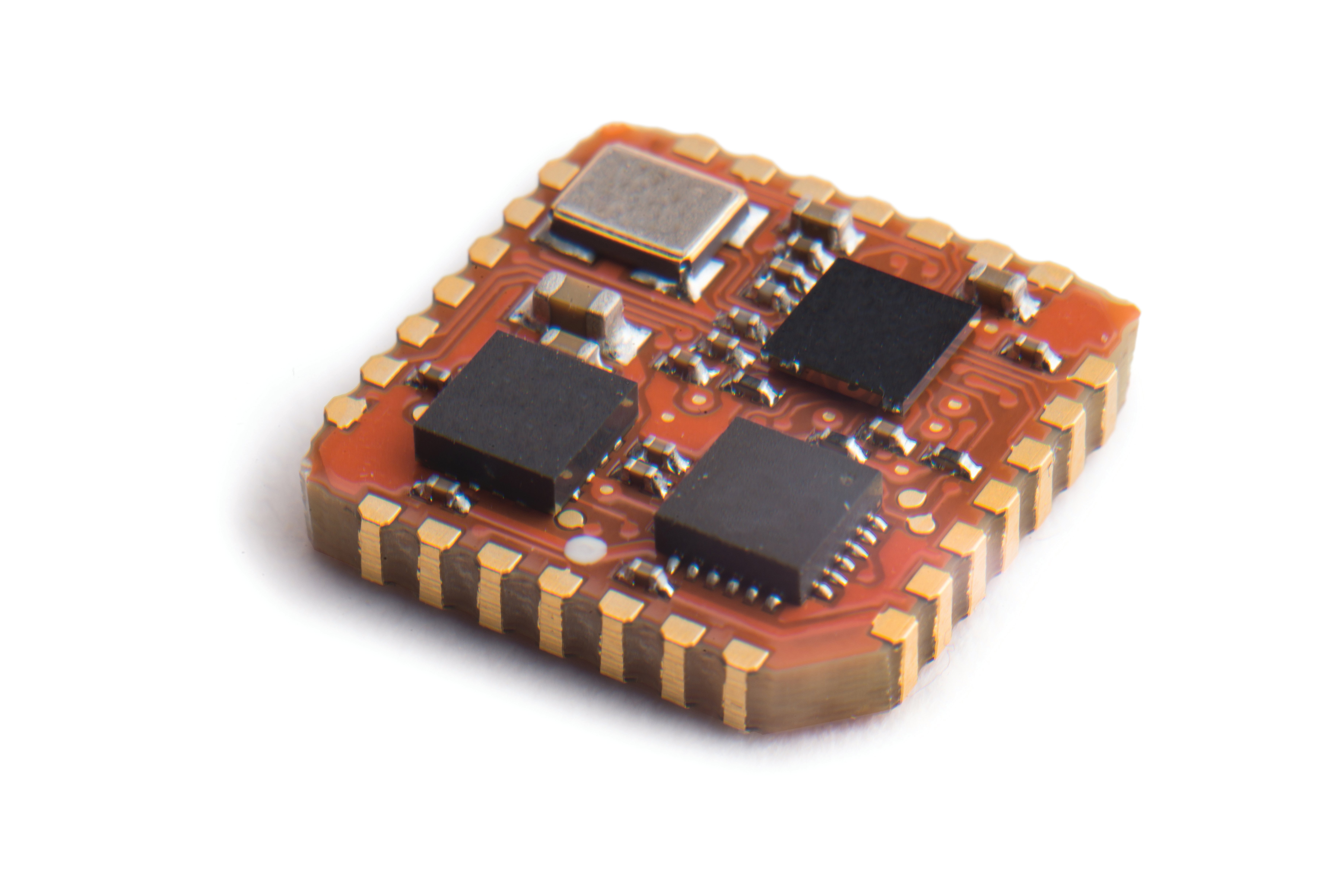
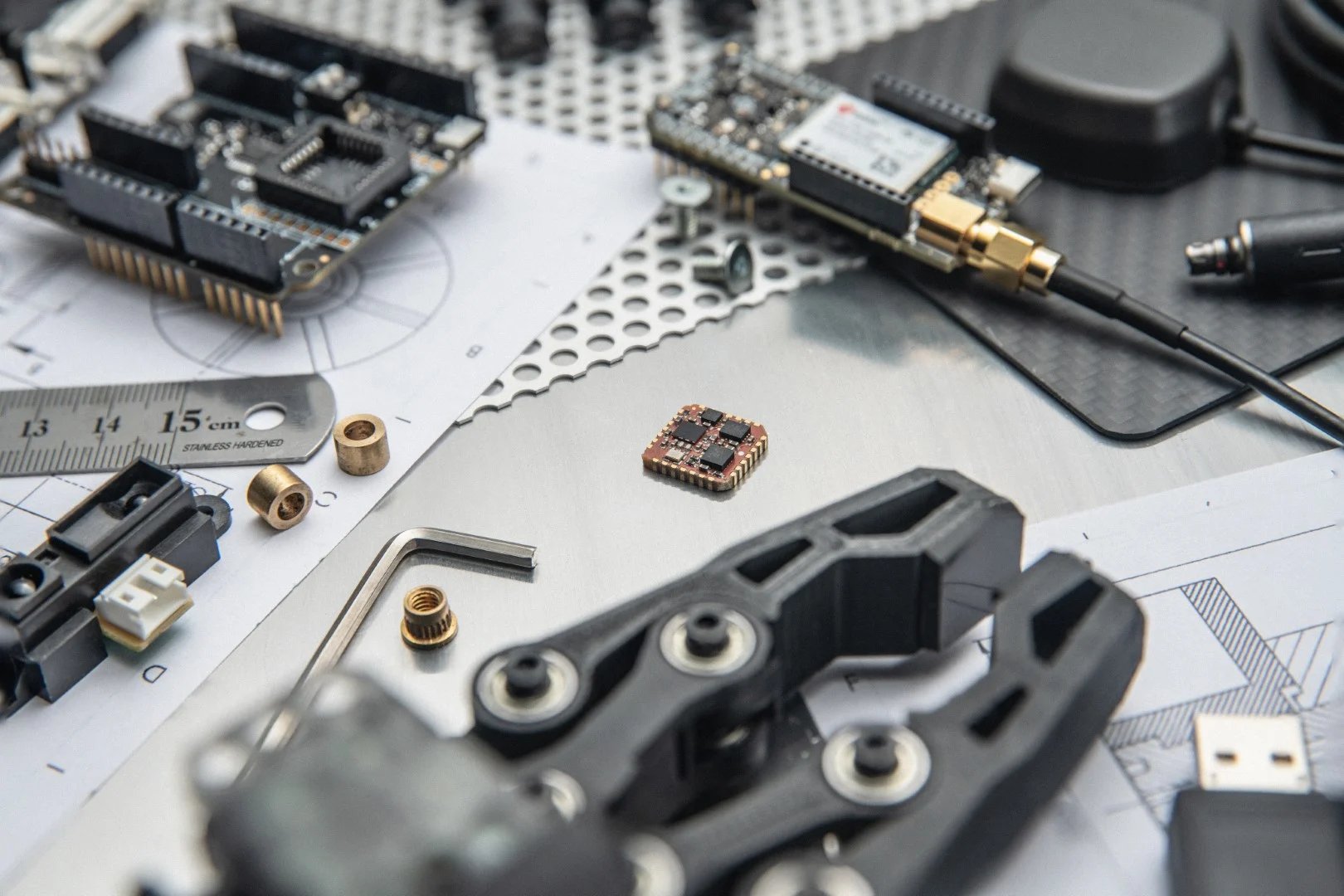
MTi 1-Series: A unique sensor module - ultracompact (12 x 12 mm) size with onboard sensor fusion.
-
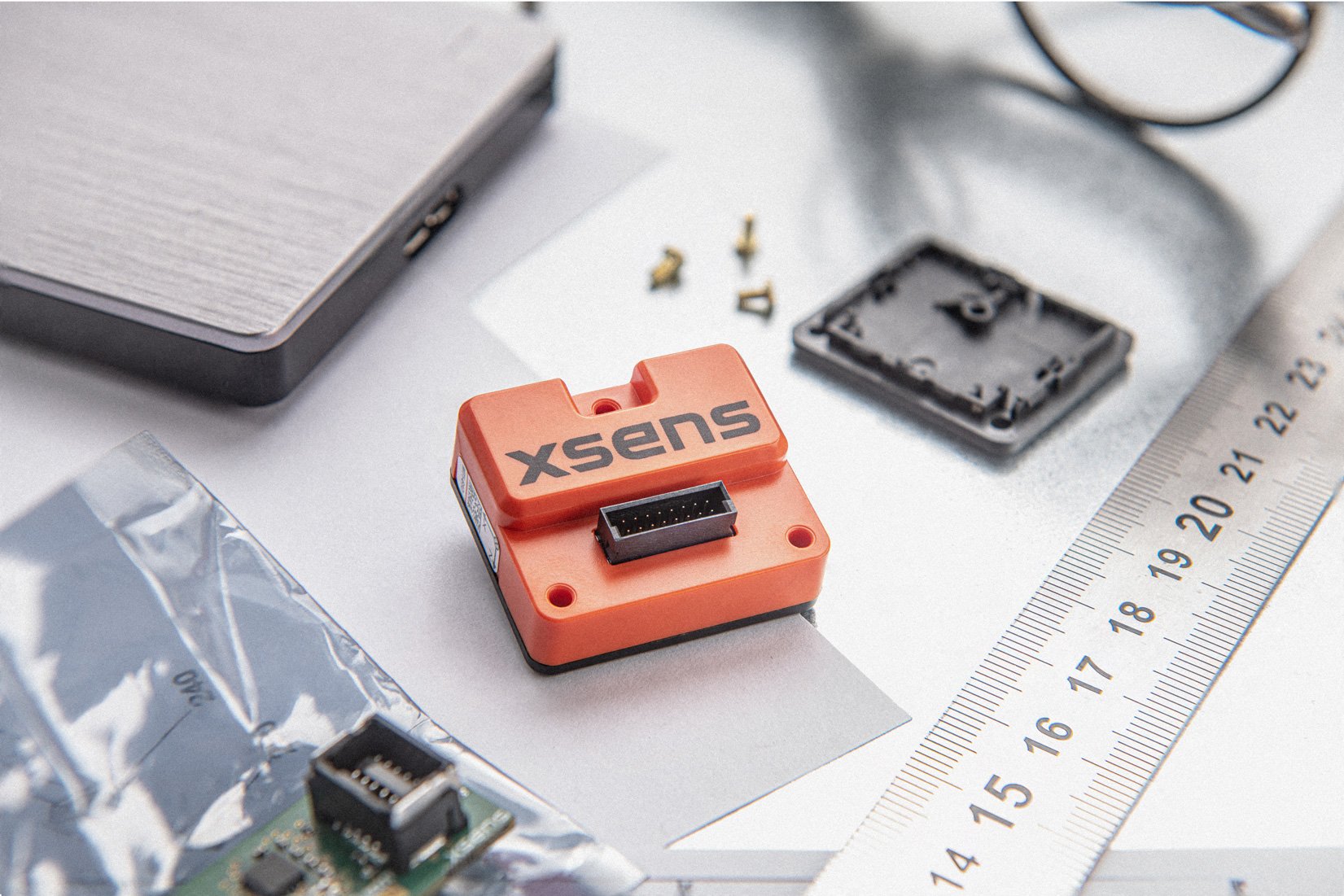
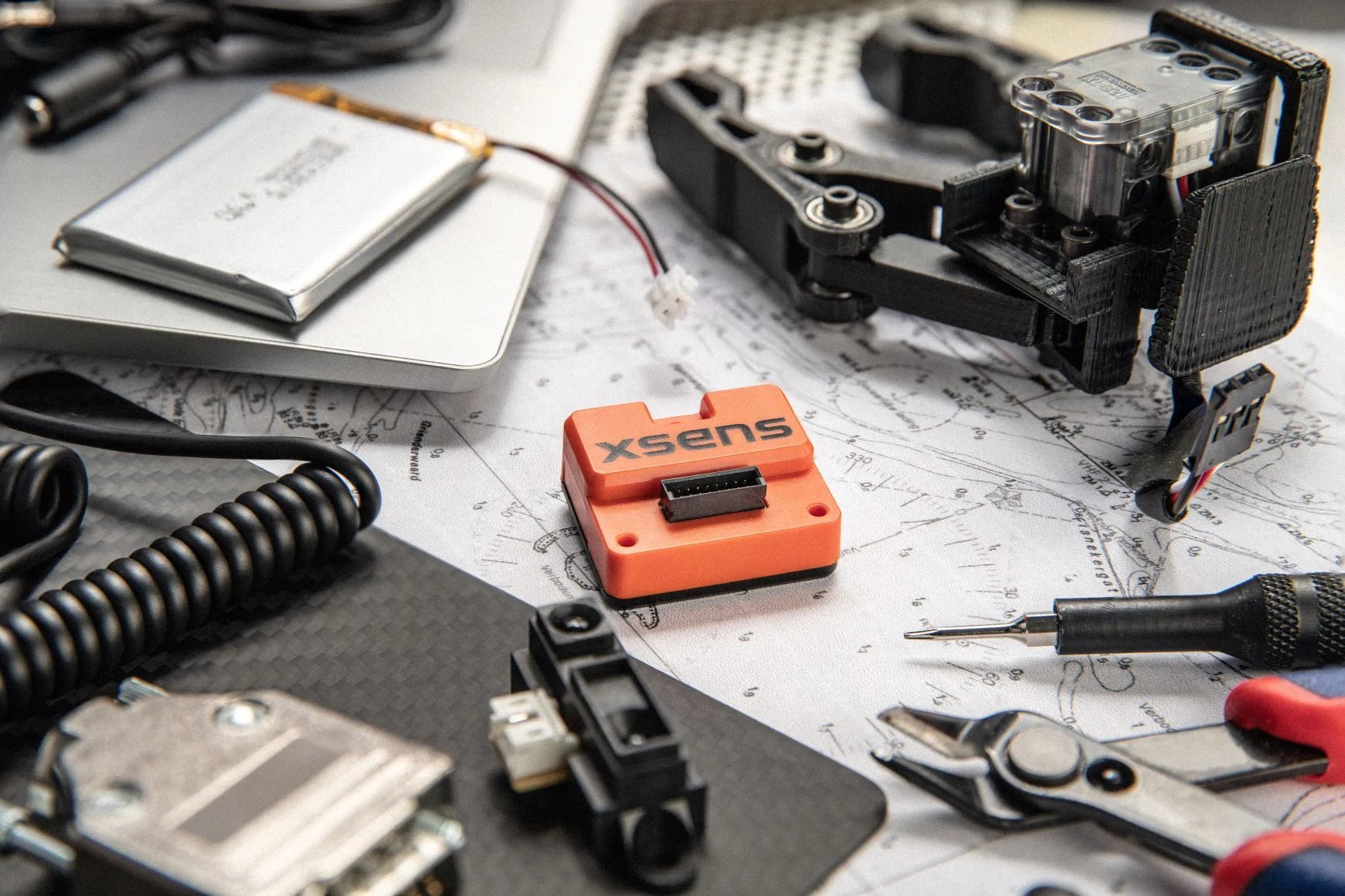
MTi 600-Series: Our most flexible and complete series - from simple IMU to GNSS/INS + RTK, available in both OEM and Rugged form factors.
-
Xsens Avior Series: Premium OEM solution - high-performance for demanding applications, in a low SwaP-C package.
-
Xsens Sirius: High-accuracy motion data in an IP68 MIL-STD housing - perfect for the most challenging environments.
-
Xsens Vision Navigator: Dual RTK GNSS, internal IMU, camera, and visual-inertial odometry technology - for GNSS-denied environments.

Below you can find an overview of Xsens portfolio of industrial sensor modules and functionalities.
(IP00, SMD)
(IP51, IP68)
(IP51)
(IP68 MIL-STD)
(IP67)
Below you can find an overview of Xsens portfolio of industrial sensor modules and the interfaces they support.
(IP00, SMD)
(IP51, IP68)
(IP51)
(IP68 MIL-STD)
(IP67)
Functionality
Depending on your application, you might need a sensor with a specific functionality. Our portfolio is very flexible and offers plenty of options to fit your design needs.
--> Check the typical applications for our inertial sensor modules.

An inertial measurement unit collects and outputs accelerometer, gyroscope, and magnetometer data, fully synchronized and calibrated.

Vertical reference units are like IMUs with an added layer of algorithms, using gravity as a reference for roll and pitch calculations.

Attitude and heading reference systems (AHRS) use sensor fusion to deliver data on roll, pitch and yaw, also known as heading.

A Motion Reference Unit (MRU) measures roll, pitch, and heave motion. Designed for marine applications, it is used for vessel stabilization & heave compensation.

Our GNSS/INS products offer all IMU data as well as full orientation and position/velocity/time data up to CM-level with RTK-enabled products.

Visual-inertial odometry provides accurate real-time navigation data, even in challenging or GNSS-denied environments.


.jpeg?width=1620&height=1080&name=MTi-670b%20(Large).jpeg)

-jpg-2.jpeg?width=1624&height=1080&name=MTi-680b%20(Large)-jpg-2.jpeg)



