Uncertainty Output: Improving Confidence & Reliability in Motion Sensing
When precision matters, knowing how much you can trust your IMU sensor data is crucial. Xsens industrial sensors, Xsens Avior and Xsens Sirius (VRU and AHRS models), take reliability a step further by providing not just orientation estimates, but also a quantitative measure of uncertainty. This allows engineers, researchers, and developers to make informed decisions based on the confidence level of each data point.
What Is Uncertainty Output in Xsens IMUs?
Xsens inertial sensor modules estimate orientation using advanced Kalman filtering algorithms. With firmware version 1.3.0 and later, these sensors output orientation in both quaternions and Euler angles, along with an uncertainty value.
This uncertainty is derived from the internal state covariance matrix - a mathematical representation of the filter’s belief about the accuracy of its estimates.
- Covariance Matrix: The diagonal values indicate confidence. High values mean less confidence; low values mean more confidence.
- Standard Deviation (σ): The uncertainty output is typically expressed as the standard deviation, calculated as the square root of the diagonal elements of the covariance matrix.
- Interpretation: A 1-sigma range means there’s a 68.3% probability the true value lies within ±σ of the estimate; a 3-sigma range covers 99.7%. These interpretations assume Gaussian error distributions, which generally hold in Kalman filtering but are not guaranteed in every scenario.
How Does Uncertainty Output Help You?
- Quality Assessment: Instantly assess the reliability of each orientation estimate.
- Data Filtering: Use uncertainty values to filter out low-confidence data, improving the quality of your analysis.
- Real-Time Decisions: Make smarter, data-driven decisions in real time, especially in critical applications like robotics, autonomous vehicles, and biomechanics.
Practical Example
Suppose you’re integrating the Xsens Avior into a drone navigation system. By monitoring the uncertainty output, you can program the system to ignore or flag orientation data with high uncertainty, reducing the risk of navigation errors and improving overall stability.
How to Access and Use Uncertainty Output
Xsens provides uncertainty values for both quaternion and Euler angle outputs:
-
For quaternions: The output provides three standard deviation values corresponding to the x, y, z components of the quaternion.
-
For Euler angles: The output includes three components for roll, pitch, and yaw standard deviations.
-
Units: All uncertainty values are expressed in radians (rad).
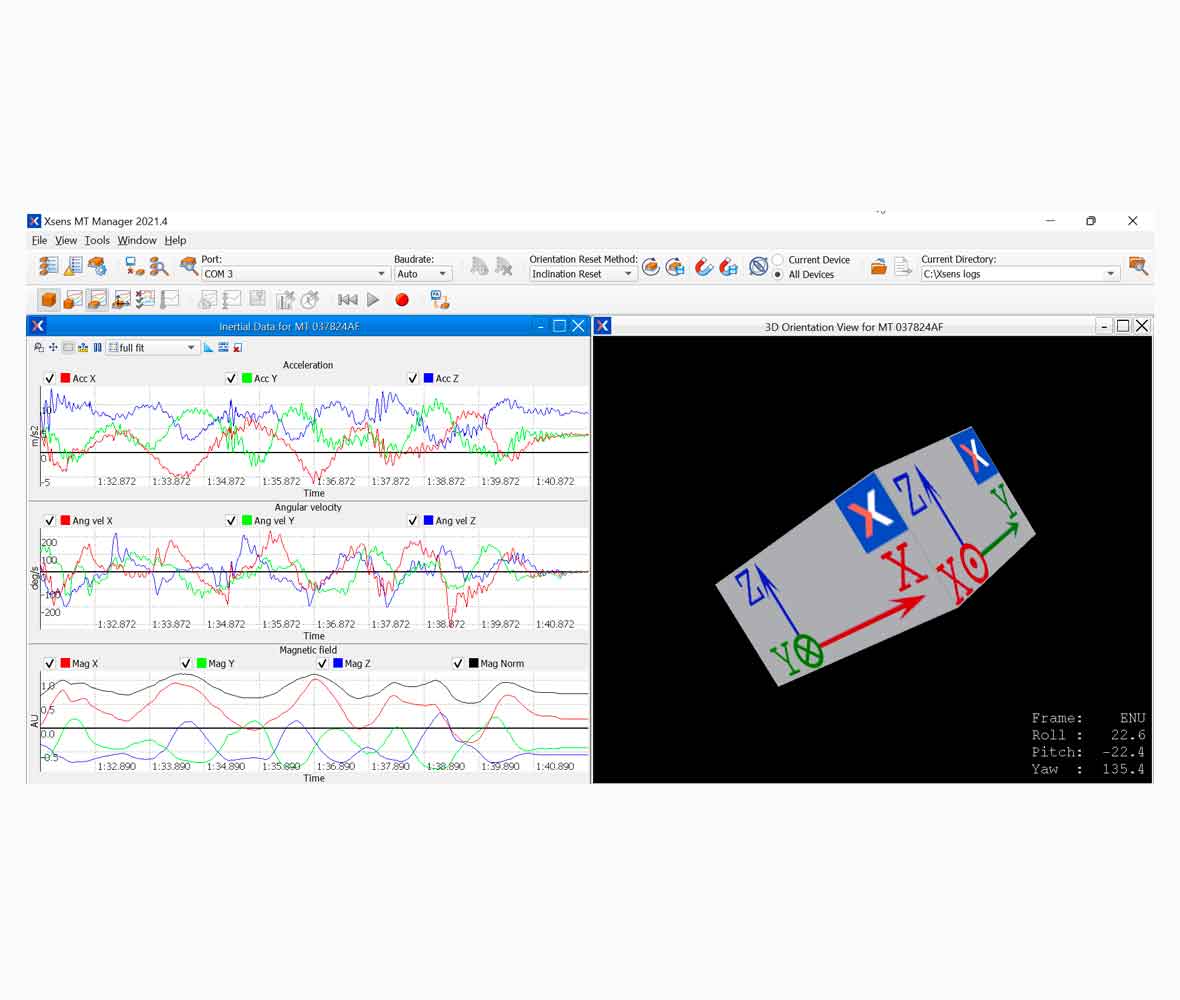
In MT Manager, you can visualize the uncertainty outputs as separate channels alongside orientation data — allowing you to instantly assess the confidence of your measurements.
These values are also accessible via the XDA API and MT SDK, enabling real-time integration into your applications.
Technical Output Reference
| Parameter |
Description |
| Output names |
Orientation Uncertainty (Euler) [rad], Orientation Uncertainty (Quaternion) [rad] |
| Units |
Radians (standard deviation per axis) |
| Access via |
MT Manager, XDA API, MT SDK |
| Supported devices |
Xsens Avior and Xsens Sirius (VRU and AHRS models) |
| Firmware requirement |
Version 1.3.0 or later |
Conclusion
Xsens’ approach to uncertainty output gives you a transparent, quantitative way to judge the reliability of your orientation data. This not only improves confidence in your results but also enables smarter, safer, and more efficient applications across industries.
For a detailed technical explanation, read our Knowledge Base article on Understanding and Using Orientation Uncertainty Output.

-1.png?length=360&name=Screenshot%20(5)-1.png)

