
19th August 2009
In a test with the test aircraft Aero L-29 Delfin jet of the Avionics Engineering Center (AEC, Ohio University) research engineers have proven that the Miniature GPS-aided Attitude Heading Reference System (AHRS) MTi-G of Xsens provides excellent attitude and heading accuracy even during high dynamic flight tests.
Flight tests were conducted by mounting a Honeywell HG 1150 Intertial Reference Unit and an Xsens MTi-G (now MTi-G-710) in an Aero L-29 Delfin jet aircraft. High dynamic flight missions took off from the University’s Avionics Engineering Center own airfield in Albany, Ohio with the goal of testing the limits and accuracy of the MTi-G. The test results showed that the accuracy of the MTi-G, which is based on miniature MEMS inertial sensors, stayed within 2 deg RMS (roll/pitch/yaw: 0.93º / 1.07º / 1.26º) from the HG 1150 IRU, a navigation grade INS, for the full flight, including alignment errors. Xsens will continue to work closely with AEC to perform further testing and research.
Marcel van Hak, Product Manager Industrial Applications of Xsens, explains: “Conventional MEMS AHRS’s use gyroscopes to calculate the orientation and reference this orientation with gravity and the earth magnetic field, to compensate for the gyroscope drift. However, in aerospace applications, the accelerometers are subject to lateral accelerations for extended periods of time and are therefore not suitable as a vertical reference, without additional aiding information. Aiding from a miniature L1 GPS adds the additional information needed to obtain a very accurate robust AHRS, even under highly dynamic circumstances such as in the Delfin. The tests show that the advanced Kalman-filter, embedded in the MTi-G DSP, is working accurately, even under challenging dynamic circumstances.”
The great outcome is the result of the work of Xsens’ R&D engineers, who contributed to the launch of the MTi-G in late 2007 and their continuous efforts to improve on this trendsetting product.
> KML file of the trajectory (right mouse click and "Save Target As...")
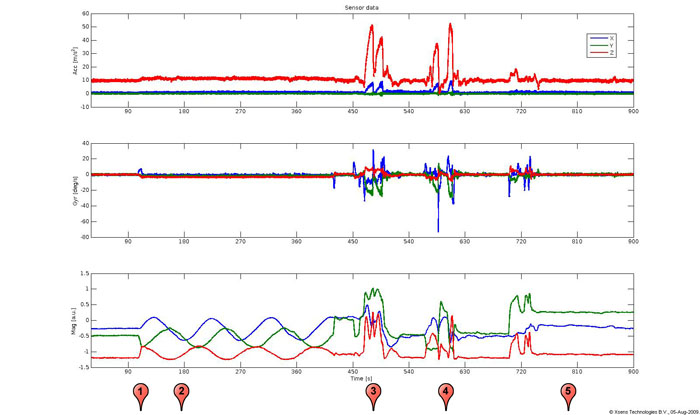
Figure 1:
Graph showing the sensor data of the MTi-G. The red digits correspond to the placemarks in the .kml file.
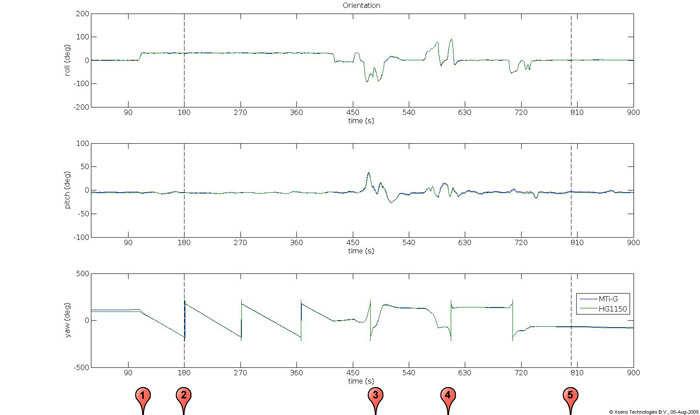
Figure 2:
Graph showing the orientation data of the MTi-G and HG1150. The RMS values are calculated over the 10 minutes time between the two dashed vertical lines. RMS values are 0.93º, 1.07º and 1.26º respectively for roll/pitch/yaw.
Related articles



