
16th April 2013
Ulrich Walder, Thomas Bernoulli, Martin Krammer
Graz University of Technology and AIONAV Systems Ltd, Berne
Background
It is a basic need for humans to find their way through natural and built environments. Thanks to GPS, this problem is relatively well solved in a natural environment; however, it can be very difficult or even impossible to do so in urban areas, in buildings or in underground infrastructures. Especially if positioning and navigation have to be solved autonomously, i. e. without any special infrastructure, no methods with a precision of a few meters during an hour or more existed until today.
Modern fire fighting in urban areas under dangerous conditions and restricted visibility is a real challenge not only for every single fire fighter, but also for the responsible of the operational command. The success of such operations essentially depends on the fact of arriving on time at the site of operation, as for example the fire source itself or fire-captured persons. In order to guarantee this, the fire fighter needs a rapid and secure orientation on the target on the one hand and the commanders need a permanently updated situational awareness of all events, especially the precise position of all persons in the area of operations, on the other hand.
The potential in other fields of application is very big as well: police, Special Forces, military, but also many civil applications like indoor location based services.
Movie: Navigation around and in the Sydney Opera House
Method
AIONAV–F allows the autonomous 3D positioning and navigation of individual fire fighters, the display of the position on any geo-referenced map as well as the fusion of the information for the situational awareness on a command station; all this with high accuracy and in any area of operations.
Determination of the position is primarily done by a foot mounted inertial sensor (Xsens MTw) and can secondly be fused with position data of additional systems (GPS, barometer, RFID, etc). A further improvement of results can be achieved by using building interaction techniques in case floor plans are available. The basic high accuracy of the IMU results is achieved by newly developed, meanwhile patented Zero-Velocity-Update algorithms.
AIONAV is the result of a research project at Graz University of Technology. The system has been developed in close coordination and cooperation with renowned companies of the procurement and security sector.
Results
Below the results of 150 test runs with a length of 150m to 5km are summarized. As error measure serves the difference between the staring and end point of the travelled path. At the same time the local deviation on the map or in the floor plan has never been larger than this final value. The test runs were accomplished over 2 years, starting with Xsens MTx sensors. With the employment of better sensors (today we use Xsens MTw) the results improved remarkably.
Average length of all tracks 629.98 m
Total track length 91.98 km
Average of track time 11.02 min
Total track time 26.82 Std
Average error between start and end point 3.75 m
Average error in % 0.77 %
Some typical results with AIONAV® technology:
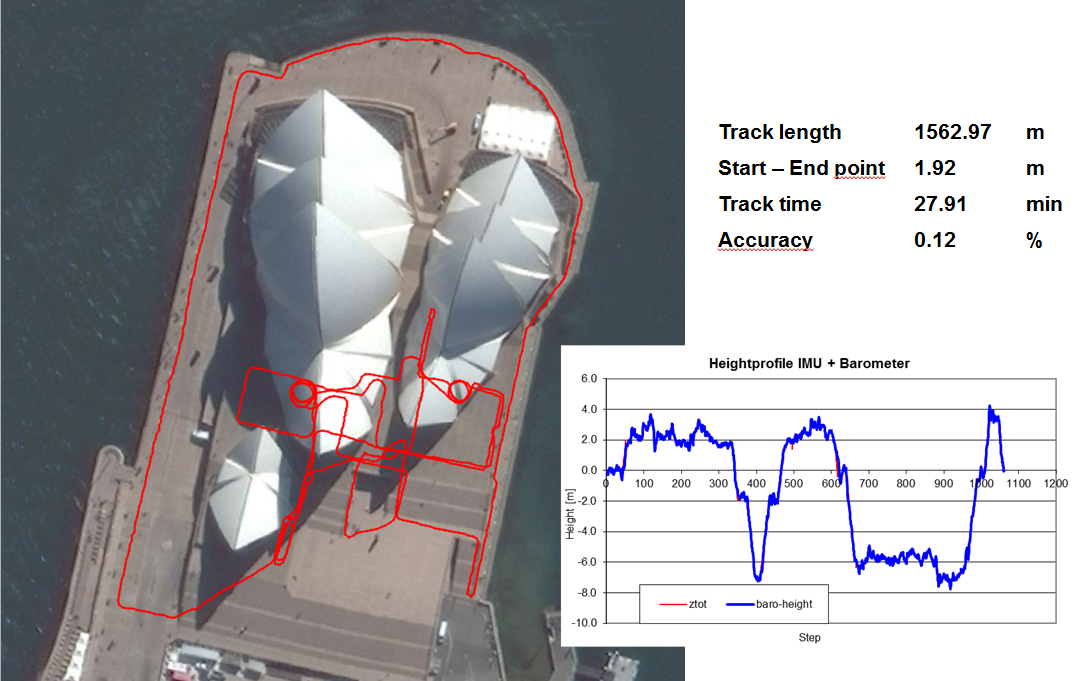
Figure 3: Test with IMU only at Sydney Opera House (click image for larger view)

Figure 4: Test at Graz University of Technology (click image for larger view)
Choosing your product
Want to know the right inertial measurement unit for your application? Try our recommendation tool and find out what MTi you need by answering just 3 questions.

Related articles



